

CanSat is a student competition organised by ESA (www.cansat.eu) that consists of sending a miniature satellite in the shape of a can of 33cl to an altitude of 1000m in order to analyse different data (atmospheric pressure, temperature, descent velocity, position, etc.) during the descent. Each team has an identical primary mission which consists of collecting a basic dataset during the flight that lasts approximately 120 seconds. The secondary mission is a mission specific to each team and this is what makes all the originality of the competition.
The various teams go to a 3-stages selection process at the national level to earn their place on the rocket, and the winner in each country participates in the European final.

Can open with top plate.
Our Team
We are the TORUS team from Collège Saint-Pierre in Brussels, Belgium. Our team is composed of 6 highly motivated students from 15 to 17 years old (core team) assisted by a number of other students who have contributed to the project throughout the year.
We decided to focus on the parachute and the effects that changes in its shape can have during the flight. By modifying the shape of our parachute from a usual semi-ellipsoidal shape to a half-torus shape (see figure) and then study the effects that this shape change generates on the descent velocity. Those changes will take place during the flight by using our ground station radio to send the commands to the can.
How are these changes going to take place? We use a servo winch which is able to modify the length of the central thread of our parachute. By pulling and releasing this central thread, the servo makes its shape change. Our team’s name: Torus, refers to the shape of our parachute when the central thread is pulled down.
After going through the first rounds of the competition we are now heading to the final and the launch of our can on an actual rocket.
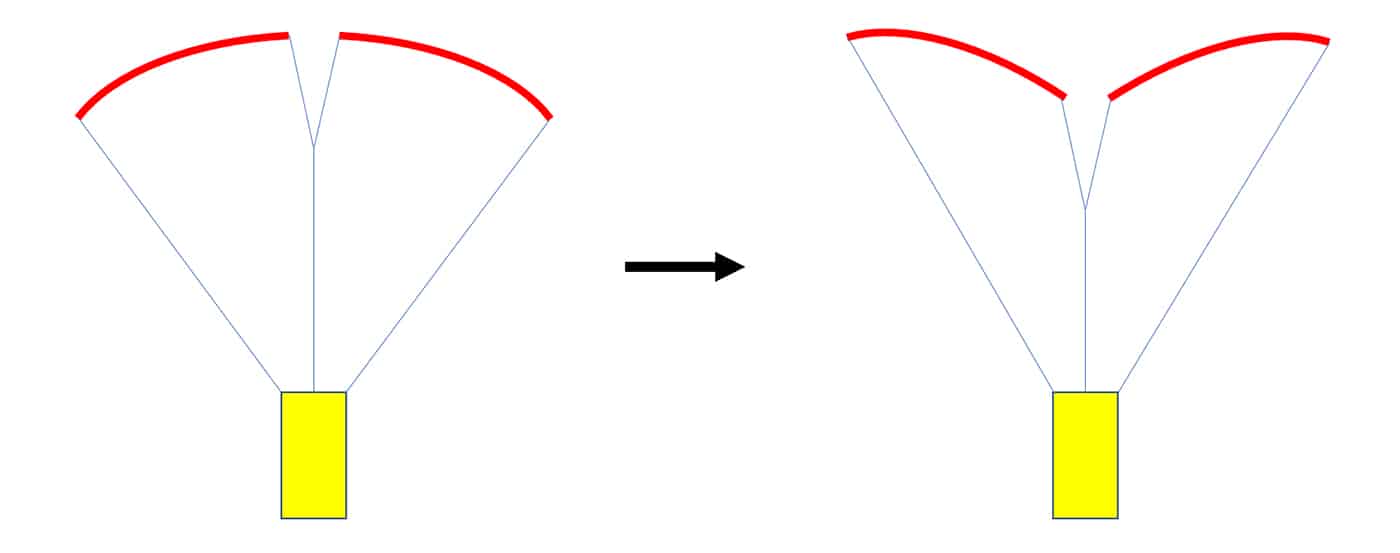
Schema Parachute
The Support
The secondary mission uses a bulky servo and a battery which makes the free space within the can quite limited. So, we decided to use PCBs for our electronics not only to increase the reliability, but also to have a very compact circuit. To design our PCBs, we used the EasyEDA software which allowed us to have a reliable and clear design. Once the design was complete, we sent our design to Eurocircuits for production.
For our project we used two separate PCBs linked together by Dupont connectors. The battery of our µController is sandwiched between the two boards. We have one PCB that contains our sensors (thermistors and voltage regulator, BMP388 pressure sensor) and another that contains the main controller and control switches. For the other compontents who are not placed on the PCBs (radio module, GPS, servo winch), we use JST connectors to connect them to our PCBs. After a first version that has been fully tested, we identified a few minor shortcomings in our design, which have been fixed in a second version. We have now fully functional PCBs and a functional and complete electrical design.
We had to learn how to properly assemble the PCBs, as badly soldered connections can break during the launch, which was highly instructive for us as well. We would like to thank Eurocircuits for their support in our project and the quality of their printed circuit boards and service overall. It was a great experience to create our circuits using state-of-the-art tools and techniques.

Controller PCB
Two naked PCBs.

Assembled PCBs

For more information, please visit our website.
Be the first to read all about our news and information. Follow us on









